
|
KiCad 9.0 |
Disaster-Response VTOL Flight Controller
R.A.M.P.A.T.
Rapid, Affordable, Modular, Printed, Aerial Tiltrotor for Emergency Response
What is your project about?
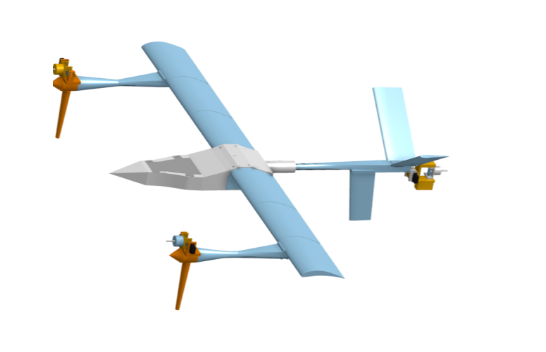
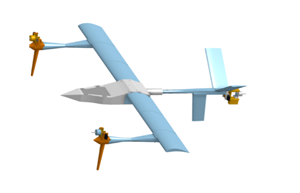
R.A.M.P.A.T. is a complete, 3D-printable tiltrotor VTOL system for disaster response. It combines a custom flight controller PCB (built around a Teensy 4.1), a tiltrotor tricopter airframe where all three motors tilt, and a novel airspeed-based blending equation to transition smoothly between hover and fixed-wing cruise. The entire aircraft costs under $1,000 to build yet delivers the endurance and search capability of commercial systems that cost $10,000 or more.
Why did you decide to make it?
Over 400,000 lives were lost to natural disasters in the past decade, with 75% of casualties occurring in the first 48 hours. Aerial reconnaissance is critical for first responders, but existing UAVs cost more than $10,000, putting them out of reach for over 80% of global first-responder agencies. I wanted to close that gap by building a drone that is affordable enough to deploy widely, modular enough to repair in the field, and performant enough to actually help in a disaster.
How does it work?
A custom 4-layer PCB flight controller with a Teensy 4.1 runs a novel airspeed-based blending equation to transition all three tilting motors between hover and cruise. The 3D-printed airframe uses carbon-fiber spars and a NACA 6409 airfoil, achieving an L/D ratio of 12.1. Throttle and all sensor readings (IMU, barometer, airspeed, magnetometer) are logged continuously to an onboard microSD card on the Teensy for post-flight analysis, while thermal video streams directly to a phone or tablet via the TCam-Mini app for live situational awareness. Flight tests show more than 2.75 hour endurance and more than 1,800 acre search capability.
A complete, 3D-printable tiltrotor VTOL system that delivers $10k-class search and endurance performance for under $1,000. Features include:
- Less than $1,000 total materials cost (vs. $10k to 15k for equivalent commercial systems)
- More than 2.75 hour endurance, more than 1,800 acre search capability
- Full VTOL capability (hover, transition, fixed-wing cruise)
- 3D-printed airframe (PETG, UV-resistant, waterproof, field-repairable)
- Modular slot-together design (under 48 hour total assembly, 5x faster than industry)
- Carbon-fiber spars with NACA 6409 airfoil (L/D ratio of 12.1)
- Tiltrotor propulsion (all 3 motors tilt, no redundant hover/cruise motors)
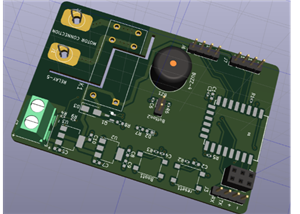
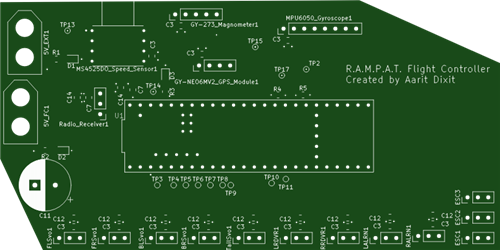
- Custom flight controller PCB (see below, the real differentiator)
- Thermal camera payload (full day/night mission capability)
- CFD-optimized aerodynamics (73% drag reduction from initial prototypes)
- Less than 1% estimated failure risk in field operations
Flight Controller
Most commercial VTOL flight controllers are black boxes designed for expensive platforms. They cost $500 or more, use proprietary firmware, lock tuning parameters, and provide no visibility into control logic. They assume you have an unlimited budget and accept that you cannot modify anything.
R.A.M.P.A.T.'s flight controller does the opposite.
Built from the ground up as a custom 4-layer PCB around a Teensy 4.1 (600MHz ARM Cortex-M7). Features include:
85% cost reduction: $75 in parts vs. $500+ for equivalent commercial autopilots
4 integrated sensors: IMU, airspeed sensor, magnetometer, GPS module, current sensor (all off-the-shelf, no proprietary parts)
9 servo outputs: controls all 3 tilt mechanisms plus aircraft surfaces
3 ESC signals: independent motor control for the tiltrotor configuration
Long-range radio telemetry: 3DR-compatible, real-time flight data
Onboard microSD card logging: throttle position and all sensor readings (IMU, barometer, airspeed, magnetometer) logged continuously for post-flight analysis
Thermal video streaming: direct to any phone or tablet via the TCam-Mini app, no additional ground station hardware required
Greater than 400Hz control loop: faster than many commercial systems (typical is 50 to 200Hz)
USB programming: no proprietary dongles or software
Why this matters for first responders: Commercial flight controllers alone cost more than R.A.M.P.A.T.'s entire airframe. By designing our own controller, we eliminated the single most expensive component while gaining full control over how the aircraft flies.
Firmware
The firmware is written from scratch in C++ (1,600+ lines), running bare-metal on the Teensy 4.1. No RTOS overhead, just tight control loops and direct hardware access.
Firmware is spread across a few components. If you are compiling yourself, you will need:
- Teensyduino / Arduino CLI for Teensy 4.1 support
- The R.A.M.P.A.T. flight controller source code (attached below)
- Eigen for matrix math (PID and mixing computations)
The core control loop implements:
PID Control
Standard PID on all three axes (pitch, roll, yaw):
u(t) = Kp * e(t) + Ki * integral(e(t) dt) + Kd * d/dt e(t)
Where u(t) is the actuator output command, e(t) is the error between desired and actual attitude. Gains are tunable in the field over telemetry. No recompilation required.
Novel Airspeed-Based Blending Equation
This is the key innovation. Most tiltrotors use simple linear mixing or hardcoded transition points. R.A.M.P.A.T. uses a sigmoid blending function that shifts control authority smoothly from tilt and multirotor modes to aerodynamic surfaces as airspeed increases:
delta = delta_cmd * (1 - sigma(V)) + delta_transition * sigma(V)
Where sigma(V) is a sigmoid function that approaches 0 at hover airspeeds and 1 at cruise airspeeds. The result is a seamless, pilot-transparent transition that does not require active management during flight mode changes.
Why this matters: Existing tiltrotor controllers cost thousands of dollars and are locked to specific airframes. This equation is airframe-agnostic, tunable, and fully open. Any researcher or first-responder agency can adapt it to their own tiltrotor design.
Flight Control Loop Sequence
- Get desired position and attitude (from RC input or future autonomous planner)
- Fuse IMU data (complementary filter, baro aiding for altitude)
- Compute error between desired and current state
- PID control on all axes
- Apply blending equation based on current airspeed
- Output to actuators: 7 servos plus 3 ESCs
- Log all data to microSD card (throttle, IMU, barometer, airspeed, magnetometer)
- Repeat at greater than 400Hz
Data Logging and Thermal Imaging
Every flight is fully documented. The Teensy 4.1 writes to an onboard microSD card continuously during operation. Logged data includes:
- Throttle position (all three motors)
- IMU readings (accelerometer and gyroscope on all axes)
- Power draw
- GPS Positionj
- Airspeed sensor data
- Magnetometer heading
- PID error terms and actuator outputs
- Flight mode and transition state
For live situational awareness, the thermal camera streams video directly to any phone or tablet using the TCam-Mini app. This gives first responders real-time thermal imaging without bulky ground stations or laptop-based receivers. The same device used for telemetry can display the thermal feed.
Hackability
All hardware designs and firmware for R.A.M.P.A.T. are open-sourced and available under permissive licensing.
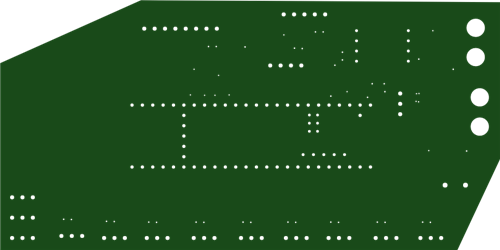
The flight controller is fully documented. This includes 4-layer KiCad source files, a complete bill of materials with vendor part numbers, and assembly notes. Anyone can fabricate the exact board from any PCB house and source the same components for about $75.
The firmware is programmable over USB-C or radio telemetry. Want to change PID tuning for a different airframe? Modify the transition airspeed threshold? Implement your own sensor fusion algorithm? Add autonomous waypoint navigation? You can program whatever you want into it.
The airframe is 3D-printable. All STEP files are included. The modular slot-together design means you can replace any broken part in hours, not days.
How this approach beats existing systems:
- Commercial flight controllers ($500+):
- Cost: $500 to $1,500
- Source access: Closed (black box)
- Firmware access: Proprietary and locked
- Tuning: Limited, via vendor app
- Sensor selection: Fixed by vendor
- Control loop rate: 50 to 200Hz typical
- Repairability: Send to vendor
- R.A.M.P.A.T. flight controller ($75):
- Cost: $75
- Source access: Full KiCad plus bill of materials
- Firmware access: Full C++ source
- Tuning: Full PID and mixing equation access
- Sensor selection: Any off-the-shelf sensor
- Control loop rate: Greater than 400Hz
- Repairability: Resolder or redesign yourself
Reproducibility Statement
Every component of R.A.M.P.A.T. is designed to be reproducible by any reasonably equipped lab, first-responder agency, or advanced hobbyist.
PCB: 4-layer, standard stackup, no blind or buried vias. Fabricate at any equivalent for about $20 for 5 boards.
Components: All parts available from DigiKey, Mouser, or LCSC. No custom or obsolete parts. Total bill of materials cost is approximately $75.
Firmware: Compile with free Teensyduino tools. No paid software required.
Airframe: Print on any standard FDM printer (Prusa, Bambu, Creality, and similar). PETG filament is about $25 per kilogram. The entire airframe uses 1.1kg of PETG, with a total airframe weight of 3.3kg.
Assembly: Hand-solderable with basic tools. The 4-layer board still uses 0.1" pitch on most component, with 0805 SMD components used. Total time from raw parts to flying aircraft is under 48 hours.
Total cost to replicate the entire aircraft, excluding RC transmitter and battery, is under $1,000.
For comparison, the closest commercial equivalent (Airmobi V21) retails for $10,000. You cannot modify its flight controller, repair its airframe in the field, or even see how its transition logic works. That is the point.
#File 1: General Code
#define USE_PWM_RX
static const uint8_t num_DSM_channels = 6;
#define USE_MPU6050_I2C
#define GYRO_500DPS
#define ACCEL_2G //Default
LIBRARIES
#include <Wire.h> //I2c communication
#include <SPI.h> //SPI communication
#include <PWMServo.h> //Commanding any extra actuators, installed with teensyduino installer
#include <SD.h>
#include <SPI.h>
File logFile;
// Logging timing
elapsedMillis logTimer;
const uint16_t LOG_PERIOD_MS = 10; // 100 Hz
bool sd_ok = false;
#if defined USE_SBUS_RX
#include "src/SBUS/SBUS.h" //sBus interface
#endif
#if defined USE_DSM_RX
#include "src/DSMRX/DSMRX.h"
#endif
USE_MPU6050_I2C
#include "src/MPU6050/MPU6050.h"
MPU6050 mpu6050;
//Setup gyro and accel full scale value selection and scale factor
#define GYRO_FS_SEL_250 MPU6050_GYRO_FS_250
#define GYRO_FS_SEL_500 MPU6050_GYRO_FS_500
#define GYRO_FS_SEL_1000 MPU6050_GYRO_FS_1000
#define GYRO_FS_SEL_2000 MPU6050_GYRO_FS_2000
#define ACCEL_FS_SEL_2 MPU6050_ACCEL_FS_2
#define ACCEL_FS_SEL_4 MPU6050_ACCEL_FS_4
#define ACCEL_FS_SEL_8 MPU6050_ACCEL_FS_8
#define ACCEL_FS_SEL_16 MPU6050_ACCEL_FS_16
#define GYRO_SCALE GYRO_FS_SEL_500
#define GYRO_SCALE_FACTOR 65.5
#define ACCEL_SCALE ACCEL_FS_SEL_2
#define ACCEL_SCALE_FACTOR 16384.0
// =========================
// SD CARD INIT
// =========================
if (SD.begin(BUILTIN_SDCARD)) {
sd_ok = true;
// Auto-increment filename
char filename[20];
int fileIndex = 0;
do {
sprintf(filename, "LOG%03d.CSV", fileIndex++);
} while (SD.exists(filename));
logFile = SD.open(filename, FILE_WRITE);
if (logFile) {
// CSV header
logFile.println(
"time_ms,"
"mode,blend,"
"roll,pitch,yaw,"
"rollPID,pitchPID,yawPID,"
"throttle,"
"m1,m2,m3,"
"s1,s2,s3,s4,s5,s6,s7,"
"ch1,ch2,ch3,ch4,ch5,ch6"
);
logFile.flush();
}
} else {
sd_ok = false;
}
//========================================================================================================================//
// USER-SPECIFIED VARIABLES //
//========================================================================================================================//
//Radio failsafe values for every channel in the event that bad reciever data is detected.
unsigned long channel_1_fs = 1000; //thro
unsigned long channel_2_fs = 1500; //ail
unsigned long channel_3_fs = 1500; //elev
unsigned long channel_4_fs = 1500; //rudd
unsigned long channel_5_fs = 2000; //gear, greater than 1500 = throttle cut
unsigned long channel_6_fs = 2000; //aux1
//Filter parameters - Defaults tuned for 2kHz loop rate; Do not touch unless you know what you are doing:
float B_madgwick = 0.04; //Madgwick filter parameter
float B_accel = 0.14; //Accelerometer LP filter paramter, (MPU6050 default: 0.14. MPU9250 default: 0.2)
float B_gyro = 0.1; //Gyro LP filter paramter, (MPU6050 default: 0.1. MPU9250 default: 0.17)
float B_mag = 1.0; //Magnetometer LP filter parameter
//Magnetometer calibration parameters -
float MagErrorX = 0.0;
float MagErrorY = 0.0;
float MagErrorZ = 0.0;
float MagScaleX = 1.0;
float MagScaleY = 1.0;
float MagScaleZ = 1.0;
//IMU calibration parameters - calibrate IMU using calculate_IMU_error() in the void setup() to get these values, then comment out calculate_IMU_error()
float AccErrorX = 0.0;
float AccErrorY = 0.0;
float AccErrorZ = 0.0;
float GyroErrorX = 0.0;
float GyroErrorY= 0.0;
float GyroErrorZ = 0.0;
//Controller parameters (take note of defaults before modifying!):
float i_limit = 25.0; //Integrator saturation level, mostly for safety (default 25.0)
float maxRoll = 30.0; //Max roll angle in degrees for angle mode (maximum ~70 degrees), deg/sec for rate mode
float maxPitch = 30.0; //Max pitch angle in degrees for angle mode (maximum ~70 degrees), deg/sec for rate mode
float maxYaw = 160.0; //Max yaw rate in deg/sec
float Kp_roll_angle = 0.2; //Roll P-gain - angle mode
float Ki_roll_angle = 0.3; //Roll I-gain - angle mode
float Kd_roll_angle = 0.05; //Roll D-gain - angle mode (has no effect on controlANGLE2)
float B_loop_roll = 0.9; //Roll damping term for controlANGLE2(), lower is more damping (must be between 0 to 1)
float Kp_pitch_angle = 0.2; //Pitch P-gain - angle mode
float Ki_pitch_angle = 0.3; //Pitch I-gain - angle mode
float Kd_pitch_angle = 0.05; //Pitch D-gain - angle mode (has no effect on controlANGLE2)
float B_loop_pitch = 0.9; //Pitch damping term for controlANGLE2(), lower is more damping (must be between 0 to 1)
float Kp_roll_rate = 0.15; //Roll P-gain - rate mode
float Ki_roll_rate = 0.2; //Roll I-gain - rate mode
float Kd_roll_rate = 0.0002; //Roll D-gain - rate mode (be careful when increasing too high, motors will begin to overheat!)
float Kp_pitch_rate = 0.15; //Pitch P-gain - rate mode
float Ki_pitch_rate = 0.2; //Pitch I-gain - rate mode
float Kd_pitch_rate = 0.0002; //Pitch D-gain - rate mode (be careful when increasing too high, motors will begin to overheat!)
float Kp_yaw = 0.3; //Yaw P-gain
float Ki_yaw = 0.05; //Yaw I-gain
float Kd_yaw = 0.00015; //Yaw D-gain (be careful when increasing too high, motors will begin to overheat!)
//========================================================================================================================//
// DECLARE PINS //
//========================================================================================================================//
//NOTE: Pin 13 is reserved for onboard LED, pins 18 and 19 are reserved for the MPU6050 IMU for default setup
//Radio:
const int PPM_Pin = 23;
//OneShot125 ESC pin outputs:
const int m1Pin = 0;
const int m2Pin = 1;
const int m3Pin = 2;
//PWM servo outputs:
const int servo1Pin = 2;
const int servo2Pin = 3;
const int servo3Pin = 4;
const int servo4Pin = 5;
const int servo5Pin = 6;
const int servo6Pin = 7;
const int servo7Pin = 8;
PWMServo servo1; //Create servo objects to control a servo or ESC with PWM
PWMServo servo2;
PWMServo servo3;
PWMServo servo4;
PWMServo servo5;
PWMServo servo6;
PWMServo servo7;
//========================================================================================================================//
//DECLARE GLOBAL VARIABLES
enum FlightMode {
MODE_HOVER,
MODE_TRANSITION,
MODE_FIXEDWING
};
FlightMode flightMode;
float transitionBlend; // 0 = hover, 1 = fixed-wing
float dt;
unsigned long current_time, prev_time;
unsigned long print_counter, serial_counter;
unsigned long blink_counter, blink_delay;
bool blinkAlternate;
//Radio communication:
unsigned long channel_1_pwm, channel_2_pwm, channel_3_pwm, channel_4_pwm, channel_5_pwm, channel_6_pwm;
unsigned long channel_1_pwm_prev, channel_2_pwm_prev, channel_3_pwm_prev, channel_4_pwm_prev;
USE_SBUS_RX
SBUS sbus(Serial5);
uint16_t sbusChannels[16];
bool sbusFailSafe;
bool sbusLostFrame;
//IMU:
float AccX, AccY, AccZ;
float AccX_prev, AccY_prev, AccZ_prev;
float GyroX, GyroY, GyroZ;
float GyroX_prev, GyroY_prev, GyroZ_prev;
float MagX, MagY, MagZ;
float MagX_prev, MagY_prev, MagZ_prev;
float roll_IMU, pitch_IMU, yaw_IMU;
float roll_IMU_prev, pitch_IMU_prev;
float q0 = 1.0f; //Initialize quaternion for madgwick filter
float q1 = 0.0f;
float q2 = 0.0f;
float q3 = 0.0f;
//Normalized desired state:
float thro_des, roll_des, pitch_des, yaw_des;
float roll_passthru, pitch_passthru, yaw_passthru;
//Controller:
float error_roll, error_roll_prev, roll_des_prev, integral_roll, integral_roll_il, integral_roll_ol, integral_roll_prev, integral_roll_prev_il, integral_roll_prev_ol, derivative_roll, roll_PID = 0;
float error_pitch, error_pitch_prev, pitch_des_prev, integral_pitch, integral_pitch_il, integral_pitch_ol, integral_pitch_prev, integral_pitch_prev_il, integral_pitch_prev_ol, derivative_pitch, pitch_PID = 0;
float error_yaw, error_yaw_prev, integral_yaw, integral_yaw_prev, derivative_yaw, yaw_PID = 0;
//Mixer
float m1_command_scaled, m2_command_scaled, m3_command_scaled, m4_command_scaled, m5_command_scaled, m6_command_scaled;
int m1_command_PWM, m2_command_PWM, m3_command_PWM, m4_command_PWM, m5_command_PWM, m6_command_PWM;
float s1_command_scaled, s2_command_scaled, s3_command_scaled, s4_command_scaled, s5_command_scaled, s6_command_scaled, s7_command_scaled;
int s1_command_PWM, s2_command_PWM, s3_command_PWM, s4_command_PWM, s5_command_PWM, s6_command_PWM, s7_command_PWM;
//Flight status
bool armedFly = false;
//========================================================================================================================//
// VOID SETUP //
//========================================================================================================================//
void setup() {
Serial.begin(500000); //USB serial
delay(500);
//Initialize all pins
pinMode(13, OUTPUT); //Pin 13 LED blinker on board, do not modify
pinMode(m1Pin, OUTPUT);
pinMode(m2Pin, OUTPUT);
pinMode(m3Pin, OUTPUT);
pinMode(m4Pin, OUTPUT);
pinMode(m5Pin, OUTPUT);
pinMode(m6Pin, OUTPUT);
servo1.attach(servo1Pin, 900, 2100); //Pin, min PWM value, max PWM value
servo2.attach(servo2Pin, 900, 2100);
servo3.attach(servo3Pin, 900, 2100);
servo4.attach(servo4Pin, 900, 2100);
servo5.attach(servo5Pin, 900, 2100);
servo6.attach(servo6Pin, 900, 2100);
servo7.attach(servo7Pin, 900, 2100);
//Set built in LED to turn on to signal startup
digitalWrite(13, HIGH);
delay(5);
//Initialize radio communication
radioSetup();
//Set radio channels to default (safe) values before entering main loop
channel_1_pwm = channel_1_fs;
channel_2_pwm = channel_2_fs;
channel_3_pwm = channel_3_fs;
channel_4_pwm = channel_4_fs;
channel_5_pwm = channel_5_fs;
channel_6_pwm = channel_6_fs;
//Initialize IMU communication
IMUinit();
delay(5);
//Get IMU error to zero accelerometer and gyro readings, assuming vehicle is level when powered up
//calculate_IMU_error(); //Calibration parameters printed to serial monitor. Paste these in the user specified variables section, then comment this out forever.
//Arm servo channels
servo1.write(0); //Command servo angle from 0-180 degrees (1000 to 2000 PWM)
servo2.write(0); //Set these to 90 for servos if you do not want them to briefly max out on startup
servo3.write(0); //Keep these at 0 if you are using servo outputs for motors
servo4.write(0);
servo5.write(0);
servo6.write(0);
servo7.write(0);
delay(5);
//calibrateESCs(); //PROPS OFF. Uncomment this to calibrate your ESCs by setting throttle stick to max, powering on, and lowering throttle to zero after the beeps
//Code will not proceed past here if this function is uncommented!
//Arm OneShot125 motors
m1_command_PWM = 125; //Command OneShot125 ESC from 125 to 250us pulse length
m2_command_PWM = 125;
m3_command_PWM = 125;
m4_command_PWM = 125;
m5_command_PWM = 125;
m6_command_PWM = 125;
armMotors(); //Loop over commandMotors() until ESCs happily arm
//Indicate entering main loop with 3 quick blinks
setupBlink(3,160,70); //numBlinks, upTime (ms), downTime (ms)
//If using MPU9250 IMU, uncomment for one-time magnetometer calibration (may need to repeat for new locations)
//calibrateMagnetometer(); //Generates magentometer error and scale factors to be pasted in user-specified variables section
}
//========================================================================================================================//
// MAIN LOOP //
//========================================================================================================================//
void loop() {
//Keep track of what time it is and how much time has elapsed since the last loop
prev_time = current_time;
current_time = micros();
dt = (current_time - prev_time)/1000000.0;
loopBlink(); //Indicate we are in main loop with short blink every 1.5 seconds
//Print data at 100hz (uncomment one at a time for troubleshooting) - SELECT ONE:
//printRadioData(); //Prints radio pwm values (expected: 1000 to 2000)
//printDesiredState(); //Prints desired vehicle state commanded in either degrees or deg/sec (expected: +/- maxAXIS for roll, pitch, yaw; 0 to 1 for throttle)
//printGyroData(); //Prints filtered gyro data direct from IMU (expected: ~ -250 to 250, 0 at rest)
//printAccelData(); //Prints filtered accelerometer data direct from IMU (expected: ~ -2 to 2; x,y 0 when level, z 1 when level)
//printMagData(); //Prints filtered magnetometer data direct from IMU (expected: ~ -300 to 300)
//printRollPitchYaw(); //Prints roll, pitch, and yaw angles in degrees from Madgwick filter (expected: degrees, 0 when level)
//printPIDoutput(); //Prints computed stabilized PID variables from controller and desired setpoint (expected: ~ -1 to 1)
//printMotorCommands(); //Prints the values being written to the motors (expected: 120 to 250)
//printServoCommands(); //Prints the values being written to the servos (expected: 0 to 180)
//printLoopRate(); //Prints the time between loops in microseconds (expected: microseconds between loop iterations)
// Get arming status
armedStatus(); //Check if the throttle cut is off and throttle is low.
//Get vehicle state
getIMUdata(); //Pulls raw gyro, accelerometer, and magnetometer data from IMU and LP filters to remove noise
Madgwick(GyroX, -GyroY, -GyroZ, -AccX, AccY, AccZ, MagY, -MagX, MagZ, dt); //Updates roll_IMU, pitch_IMU, and yaw_IMU angle estimates (degrees)
//Compute desired state
getDesState(); //Convert raw commands to normalized values based on saturated control limits
//PID Controller - SELECT ONE:
controlANGLE(); //Stabilize on angle setpoint
//controlANGLE2(); //Stabilize on angle setpoint using cascaded method. Rate controller must be tuned well first!
//controlRATE(); //Stabilize on rate setpoint
//Actuator mixing and scaling to PWM values
controlMixer(); //Mixes PID outputs to scaled actuator commands -- custom mixing assignments done here
scaleCommands(); //Scales motor commands to 125 to 250 range (oneshot125 protocol) and servo PWM commands to 0 to 180 (for servo library)
//Throttle cut check
throttleCut(); //Directly sets motor commands to low based on state of ch5
//Command actuators
commandMotors(); //Sends command pulses to each motor pin using OneShot125 protocol
servo1.write(s1_command_PWM); //Writes PWM value to servo object
servo2.write(s2_command_PWM);
servo3.write(s3_command_PWM);
servo4.write(s4_command_PWM);
servo5.write(s5_command_PWM);
servo6.write(s6_command_PWM);
servo7.write(s7_command_PWM);
//Get vehicle commands for next loop iteration
getCommands(); //Pulls current available radio commands
failSafe(); //Prevent failures in event of bad receiver connection, defaults to failsafe values assigned in setup
//Regulate loop rate
loopRate(2000); //Do not exceed 2000Hz, all filter parameters tuned to 2000Hz by default
}
//========================================================================================================================//
// FUNCTIONS //
//========================================================================================================================//
if (channel_6_pwm < 1300) {
flightMode = MODE_HOVER;
transitionBlend = 0.0;
}
else if (channel_6_pwm < 1700) {
flightMode = MODE_TRANSITION;
transitionBlend = (channel_6_pwm - 1300.0) / 400.0; // 0 → 1
}
else {
flightMode = MODE_FIXEDWING;
transitionBlend = 1.0;
}
void controlMixer() {
// =========================
// FLIGHT MODE SELECTION
// =========================
if (channel_6_pwm < 1300) {
flightMode = MODE_HOVER;
transitionBlend = 0.0;
}
else if (channel_6_pwm < 1700) {
flightMode = MODE_TRANSITION;
transitionBlend = (channel_6_pwm - 1300.0) / 400.0;
}
else {
flightMode = MODE_FIXEDWING;
transitionBlend = 1.0;
}
// =========================
// MOTOR THRUST MIXING
// =========================
// Front motors provide roll + pitch
// Back motor provides pitch + yaw (tricopter style)
float yaw_hover = yaw_PID * (1.0 - transitionBlend);
float yaw_fw = yaw_passthru * transitionBlend;
// Front motors
m1_command_scaled = thro_des
- pitch_PID
+ roll_PID
- yaw_fw * 0.2; // small yaw assist in FW
m2_command_scaled = thro_des
- pitch_PID
- roll_PID
+ yaw_fw * 0.2;
// Back motor
m3_command_scaled = thro_des
+ pitch_PID;
// Unused
m4_command_scaled = 0;
m5_command_scaled = 0;
m6_command_scaled = 0;
// =========================
// TILT SERVO ANGLES
// =========================
// Scaled 0–1 (later mapped to 0–180)
float frontTiltDeg;
float backTiltDeg;
if (flightMode == MODE_HOVER) {
frontTiltDeg = 0.0;
backTiltDeg = 0.0;
}
else if (flightMode == MODE_TRANSITION) {
frontTiltDeg = 45.0 * transitionBlend;
backTiltDeg = 45.0 * transitionBlend;
}
else { // FIXED-WING
frontTiltDeg = 95.0;
backTiltDeg = 85.0;
}
// Normalize to 0–1
s1_command_scaled = frontTiltDeg / 180.0; // Front Left
s2_command_scaled = frontTiltDeg / 180.0; // Front Right
// Back tilts are mirrored
s3_command_scaled = backTiltDeg / 180.0;
s4_command_scaled = 1.0 - (backTiltDeg / 180.0);
// =========================
// YAW CONTROL
// =========================
// Hover: yaw servo only
// Transition: blended
// Fixed-wing: none
s5_command_scaled =
0.5
+ yaw_hover * 0.5
+ yaw_fw * 0.5;
// =========================
// RUDDERVATOR (V-TAIL) MIXING
// =========================
// Left = +Pitch + Roll
// Right = +Pitch - Roll
float pitch_mix = pitch_PID * transitionBlend;
float roll_mix = roll_PID * transitionBlend;
s6_command_scaled = 0.5 + pitch_mix + roll_mix; // Left
s7_command_scaled = 0.5 + pitch_mix - roll_mix; // Right
// =========================
// SAFETY CONSTRAINTS
// =========================
m1_command_scaled = constrain(m1_command_scaled, 0.0, 1.0);
m2_command_scaled = constrain(m2_command_scaled, 0.0, 1.0);
m3_command_scaled = constrain(m3_command_scaled, 0.0, 1.0);
s1_command_scaled = constrain(s1_command_scaled, 0.0, 1.0);
s2_command_scaled = constrain(s2_command_scaled, 0.0, 1.0);
s3_command_scaled = constrain(s3_command_scaled, 0.0, 1.0);
s4_command_scaled = constrain(s4_command_scaled, 0.0, 1.0);
s5_command_scaled = constrain(s5_command_scaled, 0.0, 1.0);
s6_command_scaled = constrain(s6_command_scaled, 0.0, 1.0);
s7_command_scaled = constrain(s7_command_scaled, 0.0, 1.0);
}
void armedStatus() {
//DESCRIPTION: Check if the throttle cut is off and the throttle input is low to prepare for flight.
if ((channel_5_pwm < 1500) && (channel_1_pwm < 1050)) {
armedFly = true;
}
}
void IMUinit() {
//DESCRIPTION: Initialize IMU
#if defined USE_MPU6050_I2C
Wire.begin();
Wire.setClock(1000000); //Note this is 2.5 times the spec sheet 400 kHz max...
mpu6050.initialize();
if (mpu6050.testConnection() == false) {
Serial.println("MPU6050 initialization unsuccessful");
Serial.println("Check MPU6050 wiring or try cycling power");
while(1) {}
}
//From the reset state all registers should be 0x00, so we should be at
//max sample rate with digital low pass filter(s) off. All we need to
//do is set the desired fullscale ranges
mpu6050.setFullScaleGyroRange(GYRO_SCALE);
mpu6050.setFullScaleAccelRange(ACCEL_SCALE);
void getIMUdata() {
//DESCRIPTION: Request full dataset from IMU and LP filter gyro, accelerometer, and magnetometer data
/*
* Reads accelerometer, gyro, and magnetometer data from IMU as AccX, AccY, AccZ, GyroX, GyroY, GyroZ, MagX, MagY, MagZ.
* These values are scaled according to the IMU datasheet to put them into correct units of g's, deg/sec, and uT. A simple first-order
* low-pass filter is used to get rid of high frequency noise in these raw signals.
*The filter parameters B_gyro and B_accel are set to be good for a 2kHz loop rate. Finally,
* the constant errors found in calculate_IMU_error() on startup are subtracted from the accelerometer and gyro readings.
*/
int16_t AcX,AcY,AcZ,GyX,GyY,GyZ,MgX,MgY,MgZ;
#defined USE_MPU6050_I2C
mpu6050.getMotion6(&AcX, &AcY, &AcZ, &GyX, &GyY, &GyZ);
//Accelerometer
AccX = AcX / ACCEL_SCALE_FACTOR; //G's
AccY = AcY / ACCEL_SCALE_FACTOR;
AccZ = AcZ / ACCEL_SCALE_FACTOR;
//Correct the outputs with the calculated error values
AccX = AccX - AccErrorX;
AccY = AccY - AccErrorY;
AccZ = AccZ - AccErrorZ;
//LP filter accelerometer data
AccX = (1.0 - B_accel)*AccX_prev + B_accel*AccX;
AccY = (1.0 - B_accel)*AccY_prev + B_accel*AccY;
AccZ = (1.0 - B_accel)*AccZ_prev + B_accel*AccZ;
AccX_prev = AccX;
AccY_prev = AccY;
AccZ_prev = AccZ;
//Gyro
GyroX = GyX / GYRO_SCALE_FACTOR; //deg/sec
GyroY = GyY / GYRO_SCALE_FACTOR;
GyroZ = GyZ / GYRO_SCALE_FACTOR;
//Correct the outputs with the calculated error values
GyroX = GyroX - GyroErrorX;
GyroY = GyroY - GyroErrorY;
GyroZ = GyroZ - GyroErrorZ;
//LP filter gyro data
GyroX = (1.0 - B_gyro)*GyroX_prev + B_gyro*GyroX;
GyroY = (1.0 - B_gyro)*GyroY_prev + B_gyro*GyroY;
GyroZ = (1.0 - B_gyro)*GyroZ_prev + B_gyro*GyroZ;
GyroX_prev = GyroX;
GyroY_prev = GyroY;
GyroZ_prev = GyroZ;
//Magnetometer
MagX = MgX/6.0; //uT
MagY = MgY/6.0;
MagZ = MgZ/6.0;
//Correct the outputs with the calculated error values
MagX = (MagX - MagErrorX)*MagScaleX;
MagY = (MagY - MagErrorY)*MagScaleY;
MagZ = (MagZ - MagErrorZ)*MagScaleZ;
//LP filter magnetometer data
MagX = (1.0 - B_mag)*MagX_prev + B_mag*MagX;
MagY = (1.0 - B_mag)*MagY_prev + B_mag*MagY;
MagZ = (1.0 - B_mag)*MagZ_prev + B_mag*MagZ;
MagX_prev = MagX;
MagY_prev = MagY;
MagZ_prev = MagZ;
}
void calculate_IMU_error() {
//DESCRIPTION: Computes IMU accelerometer and gyro error on startup. Note: vehicle should be powered up on flat surface
/*
* The error values it computes are applied to the raw gyro and
* accelerometer values AccX, AccY, AccZ, GyroX, GyroY, GyroZ in getIMUdata(). This eliminates drift in the
* measurement.
*/
int16_t AcX,AcY,AcZ,GyX,GyY,GyZ,MgX,MgY,MgZ;
AccErrorX = 0.0;
AccErrorY = 0.0;
AccErrorZ = 0.0;
GyroErrorX = 0.0;
GyroErrorY= 0.0;
GyroErrorZ = 0.0;
//Read IMU values 12000 times
int c = 0;
while (c < 12000) {
#if defined USE_MPU6050_I2C
mpu6050.getMotion6(&AcX, &AcY, &AcZ, &GyX, &GyY, &GyZ);
#elif defined USE_MPU9250_SPI
mpu9250.getMotion9(&AcX, &AcY, &AcZ, &GyX, &GyY, &GyZ, &MgX, &MgY, &MgZ);
#endif
AccX = AcX / ACCEL_SCALE_FACTOR;
AccY = AcY / ACCEL_SCALE_FACTOR;
AccZ = AcZ / ACCEL_SCALE_FACTOR;
GyroX = GyX / GYRO_SCALE_FACTOR;
GyroY = GyY / GYRO_SCALE_FACTOR;
GyroZ = GyZ / GYRO_SCALE_FACTOR;
//Sum all readings
AccErrorX = AccErrorX + AccX;
AccErrorY = AccErrorY + AccY;
AccErrorZ = AccErrorZ + AccZ;
GyroErrorX = GyroErrorX + GyroX;
GyroErrorY = GyroErrorY + GyroY;
GyroErrorZ = GyroErrorZ + GyroZ;
c++;
}
//Divide the sum by 12000 to get the error value
AccErrorX = AccErrorX / c;
AccErrorY = AccErrorY / c;
AccErrorZ = AccErrorZ / c - 1.0;
GyroErrorX = GyroErrorX / c;
GyroErrorY = GyroErrorY / c;
GyroErrorZ = GyroErrorZ / c;
Serial.print("float AccErrorX = ");
Serial.print(AccErrorX);
Serial.println(";");
Serial.print("float AccErrorY = ");
Serial.print(AccErrorY);
Serial.println(";");
Serial.print("float AccErrorZ = ");
Serial.print(AccErrorZ);
Serial.println(";");
Serial.print("float GyroErrorX = ");
Serial.print(GyroErrorX);
Serial.println(";");
Serial.print("float GyroErrorY = ");
Serial.print(GyroErrorY);
Serial.println(";");
Serial.print("float GyroErrorZ = ");
Serial.print(GyroErrorZ);
Serial.println(";");
Serial.println("Paste these values in user specified variables section and comment out calculate_IMU_error() in void setup.");
}
void calibrateAttitude() {
//DESCRIPTION: Used to warm up the main loop to allow the madwick filter to converge before commands can be sent to the actuators
//Assuming vehicle is powered up on level surface!
/*
* This function is used on startup to warm up the attitude estimation and is what causes startup to take a few seconds
* to boot.
*/c
//Warm up IMU and madgwick filter in simulated main loop
for (int i = 0; i <= 10000; i++) {
prev_time = current_time;
current_time = micros();
dt = (current_time - prev_time)/1000000.0;
getIMUdata();
Madgwick(GyroX, -GyroY, -GyroZ, -AccX, AccY, AccZ, MagY, -MagX, MagZ, dt);
loopRate(2000); //do not exceed 2000Hz
}
}
void Madgwick(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz, float invSampleFreq) {
//DESCRIPTION: Attitude estimation through sensor fusion - 9DOF
// This function fuses the accelerometer gyro, and magnetometer readings AccX, AccY, AccZ, GyroX, GyroY, GyroZ, MagX, MagY, and MagZ for attitude estimation.
float recipNorm;
float s0, s1, s2, s3;
float qDot1, qDot2, qDot3, qDot4;
float hx, hy;
float _2q0mx, _2q0my, _2q0mz, _2q1mx, _2bx, _2bz, _4bx, _4bz, _2q0, _2q1, _2q2, _2q3, _2q0q2, _2q2q3, q0q0, q0q1, q0q2, q0q3, q1q1, q1q2, q1q3, q2q2, q2q3, q3q3;
#if defined USE_MPU6050_I2C
Madgwick6DOF(gx, gy, gz, ax, ay, az, invSampleFreq);
return;
#endif
//Use 6DOF algorithm if magnetometer measurement invalid (avoids NaN in magnetometer normalisation)
if((mx == 0.0f) && (my == 0.0f) && (mz == 0.0f)) {
Madgwick6DOF(gx, gy, gz, ax, ay, az, invSampleFreq);
return;
}
//Convert gyroscope degrees/sec to radians/sec
gx *= 0.0174533f;
gy *= 0.0174533f;
gz *= 0.0174533f;
//Rate of change of quaternion from gyroscope
qDot1 = 0.5f * (-q1 * gx - q2 * gy - q3 * gz);
qDot2 = 0.5f * (q0 * gx + q2 * gz - q3 * gy);
qDot3 = 0.5f * (q0 * gy - q1 * gz + q3 * gx);
qDot4 = 0.5f * (q0 * gz + q1 * gy - q2 * gx);
//Compute feedback only if accelerometer measurement valid (avoids NaN in accelerometer normalisation)
if(!((ax == 0.0f) && (ay == 0.0f) && (az == 0.0f))) {
//Normalise accelerometer measurement
recipNorm = invSqrt(ax * ax + ay * ay + az * az);
ax *= recipNorm;
ay *= recipNorm;
az *= recipNorm;
//Normalise magnetometer measurement
recipNorm = invSqrt(mx * mx + my * my + mz * mz);
mx *= recipNorm;
my *= recipNorm;
mz *= recipNorm;
//Auxiliary variables to avoid repeated arithmetic
_2q0mx = 2.0f * q0 * mx;
_2q0my = 2.0f * q0 * my;
_2q0mz = 2.0f * q0 * mz;
_2q1mx = 2.0f * q1 * mx;
_2q0 = 2.0f * q0;
_2q1 = 2.0f * q1;
_2q2 = 2.0f * q2;
_2q3 = 2.0f * q3;
_2q0q2 = 2.0f * q0 * q2;
_2q2q3 = 2.0f * q2 * q3;
q0q0 = q0 * q0;
q0q1 = q0 * q1;
q0q2 = q0 * q2;
q0q3 = q0 * q3;
q1q1 = q1 * q1;
q1q2 = q1 * q2;
q1q3 = q1 * q3;
q2q2 = q2 * q2;
q2q3 = q2 * q3;
q3q3 = q3 * q3;
//Reference direction of Earth's magnetic field
hx = mx * q0q0 - _2q0my * q3 + _2q0mz * q2 + mx * q1q1 + _2q1 * my * q2 + _2q1 * mz * q3 - mx * q2q2 - mx * q3q3;
hy = _2q0mx * q3 + my * q0q0 - _2q0mz * q1 + _2q1mx * q2 - my * q1q1 + my * q2q2 + _2q2 * mz * q3 - my * q3q3;
_2bx = sqrtf(hx * hx + hy * hy);
_2bz = -_2q0mx * q2 + _2q0my * q1 + mz * q0q0 + _2q1mx * q3 - mz * q1q1 + _2q2 * my * q3 - mz * q2q2 + mz * q3q3;
_4bx = 2.0f * _2bx;
_4bz = 2.0f * _2bz;
//Gradient decent algorithm corrective step
s0 = -_2q2 * (2.0f * q1q3 - _2q0q2 - ax) + _2q1 * (2.0f * q0q1 + _2q2q3 - ay) - _2bz * q2 * (_2bx * (0.5f - q2q2 - q3q3) + _2bz * (q1q3 - q0q2) - mx) + (-_2bx * q3 + _2bz * q1) * (_2bx * (q1q2 - q0q3) + _2bz * (q0q1 + q2q3) - my) + _2bx * q2 * (_2bx * (q0q2 + q1q3) + _2bz * (0.5f - q1q1 - q2q2) - mz);
s1 = _2q3 * (2.0f * q1q3 - _2q0q2 - ax) + _2q0 * (2.0f * q0q1 + _2q2q3 - ay) - 4.0f * q1 * (1 - 2.0f * q1q1 - 2.0f * q2q2 - az) + _2bz * q3 * (_2bx * (0.5f - q2q2 - q3q3) + _2bz * (q1q3 - q0q2) - mx) + (_2bx * q2 + _2bz * q0) * (_2bx * (q1q2 - q0q3) + _2bz * (q0q1 + q2q3) - my) + (_2bx * q3 - _4bz * q1) * (_2bx * (q0q2 + q1q3) + _2bz * (0.5f - q1q1 - q2q2) - mz);
s2 = -_2q0 * (2.0f * q1q3 - _2q0q2 - ax) + _2q3 * (2.0f * q0q1 + _2q2q3 - ay) - 4.0f * q2 * (1 - 2.0f * q1q1 - 2.0f * q2q2 - az) + (-_4bx * q2 - _2bz * q0) * (_2bx * (0.5f - q2q2 - q3q3) + _2bz * (q1q3 - q0q2) - mx) + (_2bx * q1 + _2bz * q3) * (_2bx * (q1q2 - q0q3) + _2bz * (q0q1 + q2q3) - my) + (_2bx * q0 - _4bz * q2) * (_2bx * (q0q2 + q1q3) + _2bz * (0.5f - q1q1 - q2q2) - mz);
s3 = _2q1 * (2.0f * q1q3 - _2q0q2 - ax) + _2q2 * (2.0f * q0q1 + _2q2q3 - ay) + (-_4bx * q3 + _2bz * q1) * (_2bx * (0.5f - q2q2 - q3q3) + _2bz * (q1q3 - q0q2) - mx) + (-_2bx * q0 + _2bz * q2) * (_2bx * (q1q2 - q0q3) + _2bz * (q0q1 + q2q3) - my) + _2bx * q1 * (_2bx * (q0q2 + q1q3) + _2bz * (0.5f - q1q1 - q2q2) - mz);
recipNorm = invSqrt(s0 * s0 + s1 * s1 + s2 * s2 + s3 * s3); // normalise step magnitude
s0 *= recipNorm;
s1 *= recipNorm;
s2 *= recipNorm;
s3 *= recipNorm;
//Apply feedback step
qDot1 -= B_madgwick * s0;
qDot2 -= B_madgwick * s1;
qDot3 -= B_madgwick * s2;
qDot4 -= B_madgwick * s3;
}
//Integrate rate of change of quaternion to yield quaternion
q0 += qDot1 * invSampleFreq;
q1 += qDot2 * invSampleFreq;
q2 += qDot3 * invSampleFreq;
q3 += qDot4 * invSampleFreq;
//Normalize quaternion
recipNorm = invSqrt(q0 * q0 + q1 * q1 + q2 * q2 + q3 * q3);
q0 *= recipNorm;
q1 *= recipNorm;
q2 *= recipNorm;
q3 *= recipNorm;
//compute angles - NWU
roll_IMU = atan2(q0*q1 + q2*q3, 0.5f - q1*q1 - q2*q2)*57.29577951; //degrees
pitch_IMU = -asin(constrain(-2.0f * (q1*q3 - q0*q2),-0.999999,0.999999))*57.29577951; //degrees
yaw_IMU = -atan2(q1*q2 + q0*q3, 0.5f - q2*q2 - q3*q3)*57.29577951; //degrees
}
void Madgwick6DOF(float gx, float gy, float gz, float ax, float ay, float az, float invSampleFreq) {
//DESCRIPTION: Attitude estimation through sensor fusion - 6DOF
float recipNorm;
float s0, s1, s2, s3;
float qDot1, qDot2, qDot3, qDot4;
float _2q0, _2q1, _2q2, _2q3, _4q0, _4q1, _4q2 ,_8q1, _8q2, q0q0, q1q1, q2q2, q3q3;
//Convert gyroscope degrees/sec to radians/sec
gx *= 0.0174533f;
gy *= 0.0174533f;
gz *= 0.0174533f;
//Rate of change of quaternion from gyroscope
qDot1 = 0.5f * (-q1 * gx - q2 * gy - q3 * gz);
qDot2 = 0.5f * (q0 * gx + q2 * gz - q3 * gy);
qDot3 = 0.5f * (q0 * gy - q1 * gz + q3 * gx);
qDot4 = 0.5f * (q0 * gz + q1 * gy - q2 * gx);
//Compute feedback only if accelerometer measurement valid (avoids NaN in accelerometer normalisation)
if(!((ax == 0.0f) && (ay == 0.0f) && (az == 0.0f))) {
//Normalise accelerometer measurement
recipNorm = invSqrt(ax * ax + ay * ay + az * az);
ax *= recipNorm;
ay *= recipNorm;
az *= recipNorm;
//Auxiliary variables to avoid repeated arithmetic
_2q0 = 2.0f * q0;
_2q1 = 2.0f * q1;
_2q2 = 2.0f * q2;
_2q3 = 2.0f * q3;
_4q0 = 4.0f * q0;
_4q1 = 4.0f * q1;
_4q2 = 4.0f * q2;
_8q1 = 8.0f * q1;
_8q2 = 8.0f * q2;
q0q0 = q0 * q0;
q1q1 = q1 * q1;
q2q2 = q2 * q2;
q3q3 = q3 * q3;
//Gradient decent algorithm corrective step
s0 = _4q0 * q2q2 + _2q2 * ax + _4q0 * q1q1 - _2q1 * ay;
s1 = _4q1 * q3q3 - _2q3 * ax + 4.0f * q0q0 * q1 - _2q0 * ay - _4q1 + _8q1 * q1q1 + _8q1 * q2q2 + _4q1 * az;
s2 = 4.0f * q0q0 * q2 + _2q0 * ax + _4q2 * q3q3 - _2q3 * ay - _4q2 + _8q2 * q1q1 + _8q2 * q2q2 + _4q2 * az;
s3 = 4.0f * q1q1 * q3 - _2q1 * ax + 4.0f * q2q2 * q3 - _2q2 * ay;
recipNorm = invSqrt(s0 * s0 + s1 * s1 + s2 * s2 + s3 * s3); //normalise step magnitude
s0 *= recipNorm;
s1 *= recipNorm;
s2 *= recipNorm;
s3 *= recipNorm;
//Apply feedback step
qDot1 -= B_madgwick * s0;
qDot2 -= B_madgwick * s1;
qDot3 -= B_madgwick * s2;
qDot4 -= B_madgwick * s3;
}
//Integrate rate of change of quaternion to yield quaternion
q0 += qDot1 * invSampleFreq;
q1 += qDot2 * invSampleFreq;
q2 += qDot3 * invSampleFreq;
q3 += qDot4 * invSampleFreq;
//Normalise quaternion
recipNorm = invSqrt(q0 * q0 + q1 * q1 + q2 * q2 + q3 * q3);
q0 *= recipNorm;
q1 *= recipNorm;
q2 *= recipNorm;
q3 *= recipNorm;
//Compute angles
roll_IMU = atan2(q0*q1 + q2*q3, 0.5f - q1*q1 - q2*q2)*57.29577951; //degrees
pitch_IMU = -asin(constrain(-2.0f * (q1*q3 - q0*q2),-0.999999,0.999999))*57.29577951; //degrees
yaw_IMU = -atan2(q1*q2 + q0*q3, 0.5f - q2*q2 - q3*q3)*57.29577951; //degrees
}
void getDesState() {
//DESCRIPTION: Normalizes desired control values to appropriate values
/*
* Updates the desired state variables thro_des, roll_des, pitch_des, and yaw_des. These are computed by using the raw
* RC pwm commands and scaling them to be within our limits defined in setup. thro_des stays within 0 to 1 range.
* roll_des and pitch_des are scaled to be within max roll/pitch amount in either degrees (angle mode) or degrees/sec
* (rate mode). yaw_des is scaled to be within max yaw in degrees/sec. Also creates roll_passthru, pitch_passthru, and
* yaw_passthru variables, to be used in commanding motors/servos with direct unstabilized commands in controlMixer().
*/
thro_des = (channel_1_pwm - 1000.0)/1000.0; //Between 0 and 1
roll_des = (channel_2_pwm - 1500.0)/500.0; //Between -1 and 1
pitch_des = (channel_3_pwm - 1500.0)/500.0; //Between -1 and 1
yaw_des = (channel_4_pwm - 1500.0)/500.0; //Between -1 and 1
roll_passthru = roll_des/2.0; //Between -0.5 and 0.5
pitch_passthru = pitch_des/2.0; //Between -0.5 and 0.5
yaw_passthru = yaw_des/2.0; //Between -0.5 and 0.5
//Constrain within normalized bounds
thro_des = constrain(thro_des, 0.0, 1.0); //Between 0 and 1
roll_des = constrain(roll_des, -1.0, 1.0)*maxRoll; //Between -maxRoll and +maxRoll
pitch_des = constrain(pitch_des, -1.0, 1.0)*maxPitch; //Between -maxPitch and +maxPitch
yaw_des = constrain(yaw_des, -1.0, 1.0)*maxYaw; //Between -maxYaw and +maxYaw
roll_passthru = constrain(roll_passthru, -0.5, 0.5);
pitch_passthru = constrain(pitch_passthru, -0.5, 0.5);
yaw_passthru = constrain(yaw_passthru, -0.5, 0.5);
}
void controlANGLE() {
//DESCRIPTION: Computes control commands based on state error (angle)
/*
* Basic PID control to stablize on angle setpoint based on desired states roll_des, pitch_des, and yaw_des computed in
* getDesState(). Error is simply the desired state minus the actual state (ex. roll_des - roll_IMU).
*/
//Roll
error_roll = roll_des - roll_IMU;
integral_roll = integral_roll_prev + error_roll*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_roll = 0;
}
integral_roll = constrain(integral_roll, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_roll = GyroX;
roll_PID = 0.01*(Kp_roll_angle*error_roll + Ki_roll_angle*integral_roll - Kd_roll_angle*derivative_roll); //Scaled by .01 to bring within -1 to 1 range
//Pitch
error_pitch = pitch_des - pitch_IMU;
integral_pitch = integral_pitch_prev + error_pitch*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_pitch = 0;
}
integral_pitch = constrain(integral_pitch, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_pitch = GyroY;
pitch_PID = .01*(Kp_pitch_angle*error_pitch + Ki_pitch_angle*integral_pitch - Kd_pitch_angle*derivative_pitch); //Scaled by .01 to bring within -1 to 1 range
//Yaw, stablize on rate from GyroZ
error_yaw = yaw_des - GyroZ;
integral_yaw = integral_yaw_prev + error_yaw*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_yaw = 0;
}
integral_yaw = constrain(integral_yaw, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_yaw = (error_yaw - error_yaw_prev)/dt;
yaw_PID = .01*(Kp_yaw*error_yaw + Ki_yaw*integral_yaw + Kd_yaw*derivative_yaw); //Scaled by .01 to bring within -1 to 1 range
//Update roll variables
integral_roll_prev = integral_roll;
//Update pitch variables
integral_pitch_prev = integral_pitch;
//Update yaw variables
error_yaw_prev = error_yaw;
integral_yaw_prev = integral_yaw;
}
void controlANGLE2() {
//DESCRIPTION: Computes control commands based on state error (angle) in cascaded scheme
//Outer loop - PID on angle
float roll_des_ol, pitch_des_ol;
//Roll
error_roll = roll_des - roll_IMU;
integral_roll_ol = integral_roll_prev_ol + error_roll*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_roll_ol = 0;
}
integral_roll_ol = constrain(integral_roll_ol, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_roll = (roll_IMU - roll_IMU_prev)/dt;
roll_des_ol = Kp_roll_angle*error_roll + Ki_roll_angle*integral_roll_ol;// - Kd_roll_angle*derivative_roll;
//Pitch
error_pitch = pitch_des - pitch_IMU;
integral_pitch_ol = integral_pitch_prev_ol + error_pitch*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_pitch_ol = 0;
}
integral_pitch_ol = constrain(integral_pitch_ol, -i_limit, i_limit); //saturate integrator to prevent unsafe buildup
derivative_pitch = (pitch_IMU - pitch_IMU_prev)/dt;
pitch_des_ol = Kp_pitch_angle*error_pitch + Ki_pitch_angle*integral_pitch_ol;// - Kd_pitch_angle*derivative_pitch;
//Apply loop gain, constrain, and LP filter for artificial damping
float Kl = 30.0;
roll_des_ol = Kl*roll_des_ol;
pitch_des_ol = Kl*pitch_des_ol;
roll_des_ol = constrain(roll_des_ol, -240.0, 240.0);
pitch_des_ol = constrain(pitch_des_ol, -240.0, 240.0);
roll_des_ol = (1.0 - B_loop_roll)*roll_des_prev + B_loop_roll*roll_des_ol;
pitch_des_ol = (1.0 - B_loop_pitch)*pitch_des_prev + B_loop_pitch*pitch_des_ol;
//Inner loop - PID on rate
//Roll
error_roll = roll_des_ol - GyroX;
integral_roll_il = integral_roll_prev_il + error_roll*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_roll_il = 0;
}
integral_roll_il = constrain(integral_roll_il, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_roll = (error_roll - error_roll_prev)/dt;
roll_PID = .01*(Kp_roll_rate*error_roll + Ki_roll_rate*integral_roll_il + Kd_roll_rate*derivative_roll); //Scaled by .01 to bring within -1 to 1 range
//Pitch
error_pitch = pitch_des_ol - GyroY;
integral_pitch_il = integral_pitch_prev_il + error_pitch*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_pitch_il = 0;
}
integral_pitch_il = constrain(integral_pitch_il, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_pitch = (error_pitch - error_pitch_prev)/dt;
pitch_PID = .01*(Kp_pitch_rate*error_pitch + Ki_pitch_rate*integral_pitch_il + Kd_pitch_rate*derivative_pitch); //Scaled by .01 to bring within -1 to 1 range
//Yaw
error_yaw = yaw_des - GyroZ;
integral_yaw = integral_yaw_prev + error_yaw*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_yaw = 0;
}
integral_yaw = constrain(integral_yaw, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_yaw = (error_yaw - error_yaw_prev)/dt;
yaw_PID = .01*(Kp_yaw*error_yaw + Ki_yaw*integral_yaw + Kd_yaw*derivative_yaw); //Scaled by .01 to bring within -1 to 1 range
//Update roll variables
integral_roll_prev_ol = integral_roll_ol;
integral_roll_prev_il = integral_roll_il;
error_roll_prev = error_roll;
roll_IMU_prev = roll_IMU;
roll_des_prev = roll_des_ol;
//Update pitch variables
integral_pitch_prev_ol = integral_pitch_ol;
integral_pitch_prev_il = integral_pitch_il;
error_pitch_prev = error_pitch;
pitch_IMU_prev = pitch_IMU;
pitch_des_prev = pitch_des_ol;
//Update yaw variables
error_yaw_prev = error_yaw;
integral_yaw_prev = integral_yaw;
}
void controlRATE() {
//DESCRIPTION: Computes control commands based on state error (rate)/*
//Roll
error_roll = roll_des - GyroX;
integral_roll = integral_roll_prev + error_roll*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_roll = 0;
}
integral_roll = constrain(integral_roll, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_roll = (error_roll - error_roll_prev)/dt;
roll_PID = .01*(Kp_roll_rate*error_roll + Ki_roll_rate*integral_roll + Kd_roll_rate*derivative_roll); //Scaled by .01 to bring within -1 to 1 range
//Pitch
error_pitch = pitch_des - GyroY;
integral_pitch = integral_pitch_prev + error_pitch*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_pitch = 0;
}
integral_pitch = constrain(integral_pitch, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_pitch = (error_pitch - error_pitch_prev)/dt;
pitch_PID = .01*(Kp_pitch_rate*error_pitch + Ki_pitch_rate*integral_pitch + Kd_pitch_rate*derivative_pitch); //Scaled by .01 to bring within -1 to 1 range
//Yaw, stablize on rate from GyroZ
error_yaw = yaw_des - GyroZ;
integral_yaw = integral_yaw_prev + error_yaw*dt;
if (channel_1_pwm < 1060) { //Don't let integrator build if throttle is too low
integral_yaw = 0;
}
integral_yaw = constrain(integral_yaw, -i_limit, i_limit); //Saturate integrator to prevent unsafe buildup
derivative_yaw = (error_yaw - error_yaw_prev)/dt;
yaw_PID = .01*(Kp_yaw*error_yaw + Ki_yaw*integral_yaw + Kd_yaw*derivative_yaw); //Scaled by .01 to bring within -1 to 1 range
//Update roll variables
error_roll_prev = error_roll;
integral_roll_prev = integral_roll;
GyroX_prev = GyroX;
//Update pitch variables
error_pitch_prev = error_pitch;
integral_pitch_prev = integral_pitch;
GyroY_prev = GyroY;
//Update yaw variables
error_yaw_prev = error_yaw;
integral_yaw_prev = integral_yaw;
}
void scaleCommands() {
//DESCRIPTION: Scale normalized actuator commands to values for ESC/Servo protocol
/*
* mX_command_scaled variables from the mixer function are scaled to 125-250us for OneShot125 protocol. sX_command_scaled variables from
* the mixer function are scaled to 0-180 for the servo library using standard PWM.
* mX_command_PWM are updated here which are used to command the motors in commandMotors(). sX_command_PWM are updated
* which are used to command the servos.
*/
//Scaled to 125us - 250us for oneshot125 protocol
m1_command_PWM = m1_command_scaled*125 + 125;
m2_command_PWM = m2_command_scaled*125 + 125;
m3_command_PWM = m3_command_scaled*125 + 125;
m4_command_PWM = m4_command_scaled*125 + 125;
m5_command_PWM = m5_command_scaled*125 + 125;
m6_command_PWM = m6_command_scaled*125 + 125;
//Constrain commands to motors within oneshot125 bounds
m1_command_PWM = constrain(m1_command_PWM, 125, 250);
m2_command_PWM = constrain(m2_command_PWM, 125, 250);
m3_command_PWM = constrain(m3_command_PWM, 125, 250);
m4_command_PWM = constrain(m4_command_PWM, 125, 250);
m5_command_PWM = constrain(m5_command_PWM, 125, 250);
m6_command_PWM = constrain(m6_command_PWM, 125, 250);
//Scaled to 0-180 for servo library
s1_command_PWM = s1_command_scaled*180;
s2_command_PWM = s2_command_scaled*180;
s3_command_PWM = s3_command_scaled*180;
s4_command_PWM = s4_command_scaled*180;
s5_command_PWM = s5_command_scaled*180;
s6_command_PWM = s6_command_scaled*180;
s7_command_PWM = s7_command_scaled*180;
//Constrain commands to servos within servo library bounds
s1_command_PWM = constrain(s1_command_PWM, 0, 180);
s2_command_PWM = constrain(s2_command_PWM, 0, 180);
s3_command_PWM = constrain(s3_command_PWM, 0, 180);
s4_command_PWM = constrain(s4_command_PWM, 0, 180);
s5_command_PWM = constrain(s5_command_PWM, 0, 180);
s6_command_PWM = constrain(s6_command_PWM, 0, 180);
s7_command_PWM = constrain(s7_command_PWM, 0, 180);
}
void getCommands() {
//DESCRIPTION: Get raw PWM values for every channel from the radio
USE_PPM_RX
channel_1_pwm = getRadioPWM(1);
channel_2_pwm = getRadioPWM(2);
channel_3_pwm = getRadioPWM(3);
channel_4_pwm = getRadioPWM(4);
channel_5_pwm = getRadioPWM(5);
channel_6_pwm = getRadioPWM(6);
}
//Low-pass the critical commands and update previous values
float b = 0.7; //Lower=slower, higher=noiser
channel_1_pwm = (1.0 - b)*channel_1_pwm_prev + b*channel_1_pwm;
channel_2_pwm = (1.0 - b)*channel_2_pwm_prev + b*channel_2_pwm;
channel_3_pwm = (1.0 - b)*channel_3_pwm_prev + b*channel_3_pwm;
channel_4_pwm = (1.0 - b)*channel_4_pwm_prev + b*channel_4_pwm;
channel_1_pwm_prev = channel_1_pwm;
channel_2_pwm_prev = channel_2_pwm;
channel_3_pwm_prev = channel_3_pwm;
channel_4_pwm_prev = channel_4_pwm;
}
void failSafe() {
//DESCRIPTION: If radio gives bad values, set all commands to default values
unsigned minVal = 800;
unsigned maxVal = 2200;
int check1 = 0;
int check2 = 0;
int check3 = 0;
int check4 = 0;
int check5 = 0;
int check6 = 0;
//Triggers for failure criteria
if (channel_1_pwm > maxVal || channel_1_pwm < minVal) check1 = 1;
if (channel_2_pwm > maxVal || channel_2_pwm < minVal) check2 = 1;
if (channel_3_pwm > maxVal || channel_3_pwm < minVal) check3 = 1;
if (channel_4_pwm > maxVal || channel_4_pwm < minVal) check4 = 1;
if (channel_5_pwm > maxVal || channel_5_pwm < minVal) check5 = 1;
if (channel_6_pwm > maxVal || channel_6_pwm < minVal) check6 = 1;
//If any failures, set to default failsafe values
if ((check1 + check2 + check3 + check4 + check5 + check6) > 0) {
channel_1_pwm = channel_1_fs;
channel_2_pwm = channel_2_fs;
channel_3_pwm = channel_3_fs;
channel_4_pwm = channel_4_fs;
channel_5_pwm = channel_5_fs;
channel_6_pwm = channel_6_fs;
}
}
void commandMotors() {
//DESCRIPTION: Send pulses to motor pins, oneshot125 protocol
int wentLow = 0;
int pulseStart, timer;
int flagM1 = 0;
int flagM2 = 0;
int flagM3 = 0;
int flagM4 = 0;
int flagM5 = 0;
int flagM6 = 0;
//Write all motor pins high
digitalWrite(m1Pin, HIGH);
digitalWrite(m2Pin, HIGH);
digitalWrite(m3Pin, HIGH);
digitalWrite(m4Pin, HIGH);
digitalWrite(m5Pin, HIGH);
digitalWrite(m6Pin, HIGH);
pulseStart = micros();
//Write each motor pin low as correct pulse length is reached
while (wentLow < 6 ) { //Keep going until final (6th) pulse is finished, then done
timer = micros();
if ((m1_command_PWM <= timer - pulseStart) && (flagM1==0)) {
digitalWrite(m1Pin, LOW);
wentLow = wentLow + 1;
flagM1 = 1;
}
if ((m2_command_PWM <= timer - pulseStart) && (flagM2==0)) {
digitalWrite(m2Pin, LOW);
wentLow = wentLow + 1;
flagM2 = 1;
}
if ((m3_command_PWM <= timer - pulseStart) && (flagM3==0)) {
digitalWrite(m3Pin, LOW);
wentLow = wentLow + 1;
flagM3 = 1;
}
if ((m4_command_PWM <= timer - pulseStart) && (flagM4==0)) {
digitalWrite(m4Pin, LOW);
wentLow = wentLow + 1;
flagM4 = 1;
}
if ((m5_command_PWM <= timer - pulseStart) && (flagM5==0)) {
digitalWrite(m5Pin, LOW);
wentLow = wentLow + 1;
flagM5 = 1;
}
if ((m6_command_PWM <= timer - pulseStart) && (flagM6==0)) {
digitalWrite(m6Pin, LOW);
wentLow = wentLow + 1;
flagM6 = 1;
}
}
}
void armMotors() {
//DESCRIPTION: Sends many command pulses to the motors, to be used to arm motors in the void setup()
for (int i = 0; i <= 50; i++) {
commandMotors();
delay(2);
}
}
void calibrateESCs() {
//DESCRIPTION: Used in void setup() to allow standard ESC calibration procedure with the radio to take place.
while (true) {
prev_time = current_time;
current_time = micros();
dt = (current_time - prev_time)/1000000.0;
digitalWrite(13, HIGH); //LED on to indicate we are not in main loop
getCommands(); //Pulls current available radio commands
failSafe(); //Prevent failures in event of bad receiver connection, defaults to failsafe values assigned in setup
getDesState(); //Convert raw commands to normalized values based on saturated control limits
getIMUdata(); //Pulls raw gyro, accelerometer, and magnetometer data from IMU and LP filters to remove noise
Madgwick(GyroX, -GyroY, -GyroZ, -AccX, AccY, AccZ, MagY, -MagX, MagZ, dt); //Updates roll_IMU, pitch_IMU, and yaw_IMU (degrees)
getDesState(); //Convert raw commands to normalized values based on saturated control limits
m1_command_scaled = thro_des;
m2_command_scaled = thro_des;
m3_command_scaled = thro_des;
m4_command_scaled = thro_des;
m5_command_scaled = thro_des;
m6_command_scaled = thro_des;
s1_command_scaled = thro_des;
s2_command_scaled = thro_des;
s3_command_scaled = thro_des;
s4_command_scaled = thro_des;
s5_command_scaled = thro_des;
s6_command_scaled = thro_des;
s7_command_scaled = thro_des;
scaleCommands(); //Scales motor commands to 125 to 250 range (oneshot125 protocol) and servo PWM commands to 0 to 180 (for servo library)
//throttleCut(); //Directly sets motor commands to low based on state of ch5
servo1.write(s1_command_PWM);
servo2.write(s2_command_PWM);
servo3.write(s3_command_PWM);
servo4.write(s4_command_PWM);
servo5.write(s5_command_PWM);
servo6.write(s6_command_PWM);
servo7.write(s7_command_PWM);
commandMotors(); //Sends command pulses to each motor pin using OneShot125 protocol
//printRadioData(); //Radio pwm values (expected: 1000 to 2000)
loopRate(2000); //Do not exceed 2000Hz, all filter parameters tuned to 2000Hz by default
}
}
float floatFaderLinear(float param, float param_min, float param_max, float fadeTime, int state, int loopFreq){
//DESCRIPTION: Linearly fades a float type variable between min and max bounds based on desired high or low state and time
float diffParam = (param_max - param_min)/(fadeTime*loopFreq); //Difference to add or subtract from param for each loop iteration for desired fadeTime
if (state == 1) { //Maximum param bound desired, increase param by diffParam for each loop iteration
param = param + diffParam;
}
else if (state == 0) { //Minimum param bound desired, decrease param by diffParam for each loop iteration
param = param - diffParam;
}
param = constrain(param, param_min, param_max); //Constrain param within max bounds
return param;
}
float floatFaderLinear2(float param, float param_des, float param_lower, float param_upper, float fadeTime_up, float fadeTime_down, int loopFreq){
//DESCRIPTION: Linearly fades a float type variable from its current value to the desired value, up or down
if (param > param_des) { //Need to fade down to get to desired
float diffParam = (param_upper - param_des)/(fadeTime_down*loopFreq);
param = param - diffParam;
}
else if (param < param_des) { //Need to fade up to get to desired
float diffParam = (param_des - param_lower)/(fadeTime_up*loopFreq);
param = param + diffParam;
}
param = constrain(param, param_lower, param_upper); //Constrain param within max bounds
return param;
}
void switchRollYaw(int reverseRoll, int reverseYaw) {
//DESCRIPTION: Switches roll_des and yaw_des variables for tiltrotor-type configurations
float switch_holder;
switch_holder = yaw_des;
yaw_des = reverseYaw*roll_des;
roll_des = reverseRoll*switch_holder;
}
void throttleCut() {
//DESCRIPTION: Directly set actuator outputs to minimum value if triggered
if ((channel_5_pwm > 1500) || (armedFly == false)) {
armedFly = false;
m1_command_PWM = 120;
m2_command_PWM = 120;
m3_command_PWM = 120;
m4_command_PWM = 120;
m5_command_PWM = 120;
m6_command_PWM = 120;
//Uncomment if using servo PWM variables to control motor ESCs
//s1_command_PWM = 0;
//s2_command_PWM = 0;
//s3_command_PWM = 0;
//s4_command_PWM = 0;
//s5_command_PWM = 0;
//s6_command_PWM = 0;
//s7_command_PWM = 0;
}
}
void calibrateMagnetometer() {
USE_MPU9250_SPI
float success;
Serial.println("Beginning magnetometer calibration in");
Serial.println("3...");
delay(1000);
Serial.println("2...");
delay(1000);
Serial.println("1...");
delay(1000);
Serial.println("Rotate the IMU about all axes until complete.");
Serial.println(" ");
success = mpu9250.calibrateMag();
if(success) {
Serial.println("Calibration Successful!");
Serial.println("Please comment out the calibrateMagnetometer() function and copy these values into the code:");
Serial.print("float MagErrorX = ");
Serial.print(mpu9250.getMagBiasX_uT());
Serial.println(";");
Serial.print("float MagErrorY = ");
Serial.print(mpu9250.getMagBiasY_uT());
Serial.println(";");
Serial.print("float MagErrorZ = ");
Serial.print(mpu9250.getMagBiasZ_uT());
Serial.println(";");
Serial.print("float MagScaleX = ");
Serial.print(mpu9250.getMagScaleFactorX());
Serial.println(";");
Serial.print("float MagScaleY = ");
Serial.print(mpu9250.getMagScaleFactorY());
Serial.println(";");
Serial.print("float MagScaleZ = ");
Serial.print(mpu9250.getMagScaleFactorZ());
Serial.println(";");
Serial.println(" ");
Serial.println("If you are having trouble with your attitude estimate at a new flying location, repeat this process as needed.");
}
else {
Serial.println("Calibration Unsuccessful. Please reset the board and try again.");
}
while(1); //Halt code so it won't enter main loop until this function commented out
#endif
Serial.println("Error: MPU9250 not selected. Cannot calibrate non-existent magnetometer.");
while(1); //Halt code so it won't enter main loop until this function commented out
}
void loopRate(int freq) {
//DESCRIPTION: Regulate main loop rate to specified frequency in Hz
float invFreq = 1.0/freq*1000000.0;
unsigned long checker = micros();
//Sit in loop until appropriate time has passed
while (invFreq > (checker - current_time)) {
checker = micros();
}
}
void loopBlink() {
//DESCRIPTION: Blink LED on board to indicate main loop is running
if (current_time - blink_counter > blink_delay) {
blink_counter = micros();
digitalWrite(13, blinkAlternate); //Pin 13 is built in LED
if (blinkAlternate == 1) {
blinkAlternate = 0;
blink_delay = 100000;
}
else if (blinkAlternate == 0) {
blinkAlternate = 1;
blink_delay = 2000000;
}
}
}
void setupBlink(int numBlinks,int upTime, int downTime) {
//DESCRIPTION: Simple function to make LED on board blink as desired
for (int j = 1; j<= numBlinks; j++) {
digitalWrite(13, LOW);
delay(downTime);
digitalWrite(13, HIGH);
delay(upTime);
}
}
void printRadioData() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F(" CH1:"));
Serial.print(channel_1_pwm);
Serial.print(F(" CH2:"));
Serial.print(channel_2_pwm);
Serial.print(F(" CH3:"));
Serial.print(channel_3_pwm);
Serial.print(F(" CH4:"));
Serial.print(channel_4_pwm);
Serial.print(F(" CH5:"));
Serial.print(channel_5_pwm);
Serial.print(F(" CH6:"));
Serial.println(channel_6_pwm);
}
}
void printDesiredState() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("thro_des:"));
Serial.print(thro_des);
Serial.print(F(" roll_des:"));
Serial.print(roll_des);
Serial.print(F(" pitch_des:"));
Serial.print(pitch_des);
Serial.print(F(" yaw_des:"));
Serial.println(yaw_des);
}
}
void printGyroData() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("GyroX:"));
Serial.print(GyroX);
Serial.print(F(" GyroY:"));
Serial.print(GyroY);
Serial.print(F(" GyroZ:"));
Serial.println(GyroZ);
}
}
void printAccelData() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("AccX:"));
Serial.print(AccX);
Serial.print(F(" AccY:"));
Serial.print(AccY);
Serial.print(F(" AccZ:"));
Serial.println(AccZ);
}
}
void printMagData() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("MagX:"));
Serial.print(MagX);
Serial.print(F(" MagY:"));
Serial.print(MagY);
Serial.print(F(" MagZ:"));
Serial.println(MagZ);
}
}
void printRollPitchYaw() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("roll:"));
Serial.print(roll_IMU);
Serial.print(F(" pitch:"));
Serial.print(pitch_IMU);
Serial.print(F(" yaw:"));
Serial.println(yaw_IMU);
}
}
void printPIDoutput() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("roll_PID:"));
Serial.print(roll_PID);
Serial.print(F(" pitch_PID:"));
Serial.print(pitch_PID);
Serial.print(F(" yaw_PID:"));
Serial.println(yaw_PID);
}
}
void printMotorCommands() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("m1_command:"));
Serial.print(m1_command_PWM);
Serial.print(F(" m2_command:"));
Serial.print(m2_command_PWM);
Serial.print(F(" m3_command:"));
Serial.print(m3_command_PWM);
Serial.print(F(" m4_command:"));
Serial.print(m4_command_PWM);
Serial.print(F(" m5_command:"));
Serial.print(m5_command_PWM);
Serial.print(F(" m6_command:"));
Serial.println(m6_command_PWM);
}
}
void printServoCommands() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("s1_command:"));
Serial.print(s1_command_PWM);
Serial.print(F(" s2_command:"));
Serial.print(s2_command_PWM);
Serial.print(F(" s3_command:"));
Serial.print(s3_command_PWM);
Serial.print(F(" s4_command:"));
Serial.print(s4_command_PWM);
Serial.print(F(" s5_command:"));
Serial.print(s5_command_PWM);
Serial.print(F(" s6_command:"));
Serial.print(s6_command_PWM);
Serial.print(F(" s7_command:"));
Serial.println(s7_command_PWM);
}
}
void printLoopRate() {
if (current_time - print_counter > 10000) {
print_counter = micros();
Serial.print(F("dt:"));
Serial.println(dt*1000000.0);
}
void logData() {
if (!sd_ok || !logFile) return;
if (logTimer < LOG_PERIOD_MS) return;
logTimer = 0;
logFile.print(millis()); logFile.print(',');
logFile.print((int)flightMode); logFile.print(',');
logFile.print(transitionBlend, 3); logFile.print(',');
logFile.print(roll_IMU, 4); logFile.print(',');
logFile.print(pitch_IMU, 4); logFile.print(',');
logFile.print(yaw_IMU, 4); logFile.print(',');
logFile.print(roll_PID, 4); logFile.print(',');
logFile.print(pitch_PID, 4); logFile.print(',');
logFile.print(yaw_PID, 4); logFile.print(',');
logFile.print(thro_des, 4); logFile.print(',');
logFile.print(m1_command_scaled, 4); logFile.print(',');
logFile.print(m2_command_scaled, 4); logFile.print(',');
logFile.print(m3_command_scaled, 4); logFile.print(',');
logFile.print(s1_command_scaled, 4); logFile.print(',');
logFile.print(s2_command_scaled, 4); logFile.print(',');
logFile.print(s3_command_scaled, 4); logFile.print(',');
logFile.print(s4_command_scaled, 4); logFile.print(',');
logFile.print(s5_command_scaled, 4); logFile.print(',');
logFile.print(s6_command_scaled, 4); logFile.print(',');
logFile.print(s7_command_scaled, 4); logFile.print(',');
logFile.print(channel_1_pwm); logFile.print(',');
logFile.print(channel_2_pwm); logFile.print(',');
logFile.print(channel_3_pwm); logFile.print(',');
logFile.print(channel_4_pwm); logFile.print(',');
logFile.print(channel_5_pwm); logFile.print(',');
logFile.println(channel_6_pwm);
// Flush occasionally to reduce SD wear
static uint8_t flushCounter = 0;
if (++flushCounter >= 10) {
flushCounter = 0;
logFile.flush();
}
logData();
}
//=========================================================================================//
//HELPER FUNCTIONS
float invSqrt(float x) {
//Fast inverse sqrt for madgwick filter
/*
float halfx = 0.5f * x;
float y = x;
long i = *(long*)&y;
i = 0x5f3759df - (i>>1);
y = *(float*)&i;
y = y * (1.5f - (halfx * y * y));
y = y * (1.5f - (halfx * y * y));
return y;
*/
/*
//alternate form:
unsigned int i = 0x5F1F1412 - (*(unsigned int*)&x >> 1);
float tmp = *(float*)&i;
float y = tmp * (1.69000231f - 0.714158168f * x * tmp * tmp);
return y;
*/
return 1.0/sqrtf(x);
}
# File 2: Radio Code
unsigned long rising_edge_start_1, rising_edge_start_2, rising_edge_start_3, rising_edge_start_4, rising_edge_start_5, rising_edge_start_6;
unsigned long channel_1_raw, channel_2_raw, channel_3_raw, channel_4_raw, channel_5_raw, channel_6_raw;
int ppm_counter = 0;
unsigned long time_ms = 0;
void radioSetup() {
//PPM Receiver
#if defined USE_PPM_RX
//Declare interrupt pin
pinMode(PPM_Pin, INPUT_PULLUP);
delay(20);
//Attach interrupt and point to corresponding ISR function
attachInterrupt(digitalPinToInterrupt(PPM_Pin), getPPM, CHANGE);
//PWM Receiver
#elif defined USE_PWM_RX
//Declare interrupt pins
pinMode(ch1Pin, INPUT_PULLUP);
pinMode(ch2Pin, INPUT_PULLUP);
pinMode(ch3Pin, INPUT_PULLUP);
pinMode(ch4Pin, INPUT_PULLUP);
pinMode(ch5Pin, INPUT_PULLUP);
pinMode(ch6Pin, INPUT_PULLUP);
delay(20);
//Attach interrupt and point to corresponding ISR functions
attachInterrupt(digitalPinToInterrupt(ch1Pin), getCh1, CHANGE);
attachInterrupt(digitalPinToInterrupt(ch2Pin), getCh2, CHANGE);
attachInterrupt(digitalPinToInterrupt(ch3Pin), getCh3, CHANGE);
attachInterrupt(digitalPinToInterrupt(ch4Pin), getCh4, CHANGE);
attachInterrupt(digitalPinToInterrupt(ch5Pin), getCh5, CHANGE);
attachInterrupt(digitalPinToInterrupt(ch6Pin), getCh6, CHANGE);
delay(20);
//SBUS Recevier
#elif defined USE_SBUS_RX
sbus.begin();
//DSM receiver
#elif defined USE_DSM_RX
Serial3.begin(115000);
#else
#error No RX type defined...
#endif
}
unsigned long getRadioPWM(int ch_num) {
//DESCRIPTION: Get current radio commands from interrupt routines
unsigned long returnPWM = 0;
if (ch_num == 1) {
returnPWM = channel_1_raw;
}
else if (ch_num == 2) {
returnPWM = channel_2_raw;
}
else if (ch_num == 3) {
returnPWM = channel_3_raw;
}
else if (ch_num == 4) {
returnPWM = channel_4_raw;
}
else if (ch_num == 5) {
returnPWM = channel_5_raw;
}
else if (ch_num == 6) {
returnPWM = channel_6_raw;
}
return returnPWM;
}
//For DSM type receivers
void serialEvent3(void)
{
#if defined USE_DSM_RX
while (Serial3.available()) {
DSM.handleSerialEvent(Serial3.read(), micros());
}
#endif
}
//========================================================================================================================//
//INTERRUPT SERVICE ROUTINES (for reading PWM and PPM)
void getPPM() {
unsigned long dt_ppm;
int trig = digitalRead(PPM_Pin);
if (trig==1) { //Only care about rising edge
dt_ppm = micros() - time_ms;
time_ms = micros();
if (dt_ppm > 5000) { //Waiting for long pulse to indicate a new pulse train has arrived
ppm_counter = 0;
}
if (ppm_counter == 1) { //First pulse
channel_1_raw = dt_ppm;
}
if (ppm_counter == 2) { //Second pulse
channel_2_raw = dt_ppm;
}
if (ppm_counter == 3) { //Third pulse
channel_3_raw = dt_ppm;
}
if (ppm_counter == 4) { //Fourth pulse
channel_4_raw = dt_ppm;
}
if (ppm_counter == 5) { //Fifth pulse
channel_5_raw = dt_ppm;
}
if (ppm_counter == 6) { //Sixth pulse
channel_6_raw = dt_ppm;
}
ppm_counter = ppm_counter + 1;
}
}
void getCh1() {
int trigger = digitalRead(ch1Pin);
if(trigger == 1) {
rising_edge_start_1 = micros();
}
else if(trigger == 0) {
channel_1_raw = micros() - rising_edge_start_1;
}
}
void getCh2() {
int trigger = digitalRead(ch2Pin);
if(trigger == 1) {
rising_edge_start_2 = micros();
}
else if(trigger == 0) {
channel_2_raw = micros() - rising_edge_start_2;
}
}
void getCh3() {
int trigger = digitalRead(ch3Pin);
if(trigger == 1) {
rising_edge_start_3 = micros();
}
else if(trigger == 0) {
channel_3_raw = micros() - rising_edge_start_3;
}
}
void getCh4() {
int trigger = digitalRead(ch4Pin);
if(trigger == 1) {
rising_edge_start_4 = micros();
}
else if(trigger == 0) {
channel_4_raw = micros() - rising_edge_start_4;
}
}
void getCh5() {
int trigger = digitalRead(ch5Pin);
if(trigger == 1) {
rising_edge_start_5 = micros();
}
else if(trigger == 0) {
channel_5_raw = micros() - rising_edge_start_5;
}
}
void getCh6() {
int trigger = digitalRead(ch6Pin);
if(trigger == 1) {
rising_edge_start_6 = micros();
}
else if(trigger == 0) {
channel_6_raw = micros() - rising_edge_start_6;
}
}
Disaster-Response VTOL Flight Controller
*Wpsload community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.



Attribution-ShareAlike (CC BY-SA) License
Read More⇒













Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW



- Comments(0)
- Likes(0)
 More by Aarit
More by Aarit
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
2538 0 5 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
2994 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
3202 2 1 -
-
-
-
ESP32-C3 BLE Keyboard - Battery Powered with USB-C Charging
3269 0 2