




Metropolitan Hyperloop Pod
Metropolitan Hyperloop is a multidisciplinary engineering student design team operating out of Toronto Metropolitan University. Hyperloop is widely considered the next revolution in transportation technology. Placing it as the fifth mode of transportation, alongside air, rail, automotive, and sea, Hyperloop is truly an opportunity to connect humanity like never before. Conceived by Elon Musk in 2012 and detailed in his 2013 Hyperloop Alpha paper, the concept has since fueled international competition and engineering innovation. At Metropolitan Hyperloop, we compete on multiple global stages, which include the Hyperloop Global Competition and the European Hyperloop Week (EHW). Last year, our team took home 1st place for the Structures and Aeroshell Award & 1st place for the Braking Award at the Hyperloop Global Competition held at Queen’s University. Building on this success, our goal for 2026-27 is to create the 3rd iteration of a lightweight pod powered by multiple linear induction motors and electromagnets.
General Overview
The Metropolitan Hyperloop team is dedicated to pushing the boundaries of transportation technology by developing a competitive, efficient pod. Our focus this year shifted toward refining material choices, improving propulsion and braking, and enhancing our autonomous control capabilities.
Key Objectives:
Modular Innovation: Transitioning from a welded frame to a T-slotted modular chassis for easier subsystem integration.
Propulsion Evolution: Developing a custom Single-Sided Linear Induction Motor (SLIM) to achieve high-speed travel.
Safety & Stability: Implementing a dual braking system and a specialized Vehicle Dynamics and Control (VDC) unit to handle high-speed vibrations.
Pod Project Brief – Metropolitan Hyperloop (2025-2027)
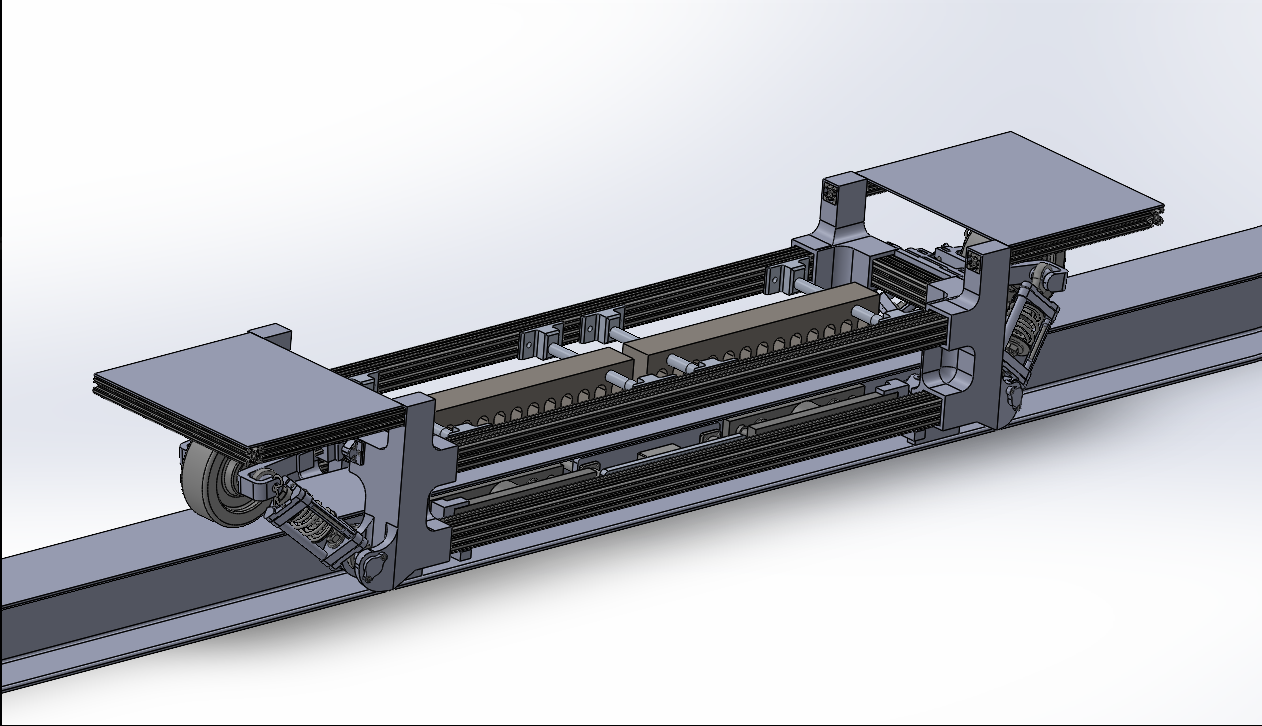
1. Chassis & Structural Design
The foundation of our pod is a 14 kg modular chassis.
Material: 6105-T5 and 6061 aluminum for an optimal strength-to-weight ratio.
Design: T-slotted extrusions provide unlimited connection points, allowing for adjustable mounting of the propulsion and braking units.
Dimensions: Approximately 4 ft x 2 ft, balancing compactness with enough surface area for complex electronics.
2. Propulsion System (SLIM)
The pod is powered by a Single-Sided Linear Induction Motor (SLIM) designed for specific thrust requirements.
Stator: Composed of electric steel with 24-gauge copper windings.
Performance Targets: Aiming for a rated thrust of ≥700 N and a linear velocity of 20 m/s.
Power: Driven by three 12V batteries feeding a 2500W DC-AC inverter and a Variable Frequency Drive (VFD) to produce a 3-phase 240V supply.
3. Dual Braking System
To ensure safe deceleration, we employ a hybrid approach:
Magnetic Braking: A rotating permanent magnet Halbach array induces Eddy currents in the I-beam for non-contact high-speed braking.
Friction Braking: Spring-loaded brake pads that engage the I-beam web.
Fail-Safe: In the event of power loss, the friction brakes automatically engage via a "normally-extending" relay configuration.
4. Vehicle Dynamics and Control (VDC)
The VDC system handles shock absorption and lateral stability.
Vertical VDC: Uses aluminum wheels with a 70A rubber coating and "reverse" shock struts to resist tension loads.
Lateral VDC: Features four caster wheels with independent suspension to minimize rolling motion.
5. Guidance, Navigation, and Control (GNC)
Our "brain" is a Raspberry Pi-based Vehicle Control System (VCS).
Concurrent Logic: Three separate threads manage data acquisition, core control (state machine), and command handling from the control station.
Safety Flags: Automatic FAULT triggers and E-stop commands cut power to the inverters and engage brakes immediately.
Project Timeline & Status
We are currently in the final integration and testing phase.
Status: Subsystem designs (Chassis, Braking, GNC) are finalized.
Critical Path: Manufacturing the SLIM and completing thermal testing on the Halbach array flywheel rig.
Upcoming Milestone: Full system testing to ensure hardware and software work cohesively before the 2027 competition.
Our Team & Support
The Metropolitan Hyperloop team relies on student innovation and the support of our sponsors to push the limits of what is possible in transit technology.

Our goal for the 2026-2027 season is to enter the European Hyperloop Competition and create a levitating pod with improved magnetic braking and a full PCB system.
8. Request
We are looking for a manufacturing partner capable of producing PCBs to improve our wire management system and, ultimately, our thermal cooling systems.
Visit us at:
Website: https://methyperloop.netlify.app/
LinkedIn: Metropolitan Hyperloop
Instagram: @MetropolitanHyperloop
Apply for sponsorship >>- Comments(0)
- Likes(0)












