SKELD // Combat Robotics Project
About the Team
Hello everybody! My name is Asiel Castillo, and I am a Creative Technologies major at Berry College. I am currently working on SKELD, a custom combat robot that I have been designing, fabricating, and building for the HackBerry Combat Robotics Tournament. Unlike many robotics projects that are developed by teams, every aspect of this robot is being completed by me alone; from the initial concept and CAD design to prototyping, fabricating, electronics integration, testing, and documentation. Through the development of SKELD, I am gaining hands-on experience in mechanical design, fabrication, problem-solving, project management, and iterative design. Every design decision, prototype revision, and component selection reflects my personal work and learning process.
The robot operates using a custom designed drive system and combat mechanism built to compete in head-to-head robotic battles. Throughout the project, I am responsible for all design, construction, troubleshooting, and testing, making SKELD a fully independent project that showcases both technical skill and dedication.

This is me!
About Combat Robotics at Berry College
SKELD is being developed as part of the Combat Robotics summer course offered through Berry College's Creative Technologies program.
The course introduces students to the principles of combat robotics through the design, construction, testing, and operation of remotely controlled robots built specifically for competitive combat. Students gain experience with mechanical design, fabrication, electronics, problem solving, prototyping, and strategic decision making while working toward a final competitive event.
At the conclusion of the course, eight student teams will compete in the HackBerry Combat Robotics Tournament. The event is open to the public and will be promoted and streamed through HackBerry Lab's media platforms, allowing members of the Berry College community and the broader public to follow the competition.
This tournament is following the 3lb class under the NHRL (National Havoc Robotics League) regulations, with minor alterations.
This is only the second year the course has been offered, making it an exciting opportunity to help establish a growing tradition of engineering-focused competition and innovation at Berry College.
Each team in the tournament was assigned a color, and SKELD's color is pink. I plan on leaning towards this for the logo and robot cosmetics.
What does SKELD mean?
The robot's design is heavily inspired by The Skeld, the iconic map from the game Among Us.
Among Us has become something of a tradition within the HackBerry Lab community. We often organize games as a way to build friendships and strengthen the MakerSpace community. Because of the impact the game has had on me, I wanted to create a robot that reflected that fun, shared experience while still being a serious engineering project.
The result is SKELD: a combat robot that combines engineering, competition, and a bit of community culture into a single design.
The SKELD logo
CAD Modeling
Every component of SKELD begins as a digital model created in Fusion 360. Before any physical prototypes are built, the robot is developed virtually, allowing me to explore ideas, test layouts, and refine designs efficiently throughout the development process.
Fusion 360 also serves as the central hub for the entire project. The CAD model allows me to verify dimensions, ensure compliance with the competition's 3lb weight class regulations, and confirm that all components fit together properly before fabrication begins. By assembling the robot digitally, potential issues can be identified and resolved early in the design process.
In addition to guiding manufacturing, the CAD model acts as a communication tool for critique. Design concepts, modifications, and future improvements can be easily shared, discussed, and evaluated before moving into prototyping and construction.
As development continues, Fusion 360 remains one of the most important tools in the creation of SKELD, providing the foundation upon which every stage of the project is built.
The current 3D model of SKELD.
Weapon System Development
Early in development, SKELD was designed around a drum spinner weapon system.
While drum spinners can be highly effective, I realized that manufacturing a reliable drum with the available fabrication methods would introduce unnecessary complexity and various additional points of failure. Rather than forcing a design that would be difficult to manufacture reliably, I applied my iterative design philosophy and reevaluated my approach.
The problem was having a very long drum, so I shortened its horizontal length. This transitioned me into using a vertical spinner weapon system utilizing a 3mm steel weapon and 3D printed assembly. The final weapon significantly improves manufacturability, reliability, and overall project feasibility.
One of the first things you may notice about SKELD's current weapon is that it is intentionally asymmetrical. The striking side of the weapon (which resembles a hammer) extends farther from the center of rotation than the counterweight side, allowing more force to be concentrated at the point of impact. This design choice increases the amount of kinetic energy delivered to an opponent during a hit while still maintaining balance throughout operation. Rather than relying on sharp edges or cutting attacks, the weapon is designed as a kinetic effector focused on delivering powerful blunt-force impacts.
Because combat robots often make contact for only a fraction of a second, I wanted to maximize the effectiveness of every hit. By concentrating the weapon's mass on the hammer side, the majority of the stored rotational energy is transferred through a single impact point, increasing the robot's ability to destabilize and launch opponents.
To complement the weapon system, SKELD also features a set of front forks. These forks are designed to get underneath opposing robots and lift one side slightly off the arena floor before weapon contact occurs. By disrupting the opponent's stability and reducing the amount of traction they have with the ground, the forks create a more favorable angle for impact. When combined with the vertical spinner, this strategy increases the likelihood of lifting, flipping, or launching opponents into the air rather than simply pushing them away.
This decision reflects an important engineering principle: successful designs are not necessarily the most ambitious, but rather the designs that can be built, tested, and improved effectively.
The current weapon design.
Prototyping and Testing
Rapid prototyping has been a critical part of SKELD's development.
I have already produced a full foamcore prototype that allowed me to evaluate dimensions, internal layout, and drivability before committing to final manufacturing. The prototype successfully demonstrated the overall design concept and verified that the robot's drive system performs as expected.
By building physical prototypes early, I can identify potential issues before investing significant resources into final parts.
An example of this would be the application of the brushless motor used for the weapon. I had trouble finding out a way to model it on Fusion 360, so I used foam core to make a quick mockup, received critique, and had a better version (the bracket you see below) in less than 1 minute. This shows the power the foam core prototypes can have. CAD modeling is great, but sometimes you need to physically interact with a prototype.
This iterative workflow allows me to move quickly, test frequently, and continuously improve the robot throughout development.
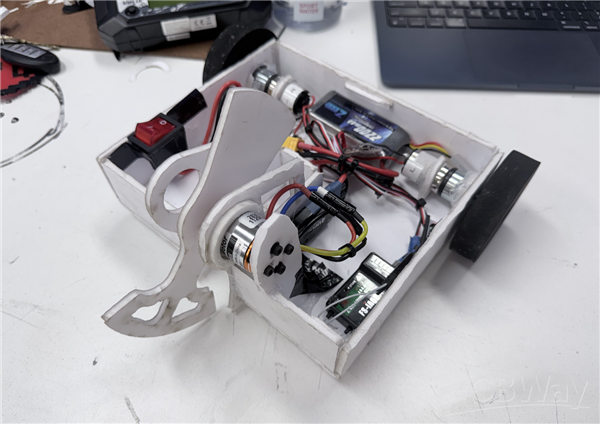
Foamcore prototype of SKELD.
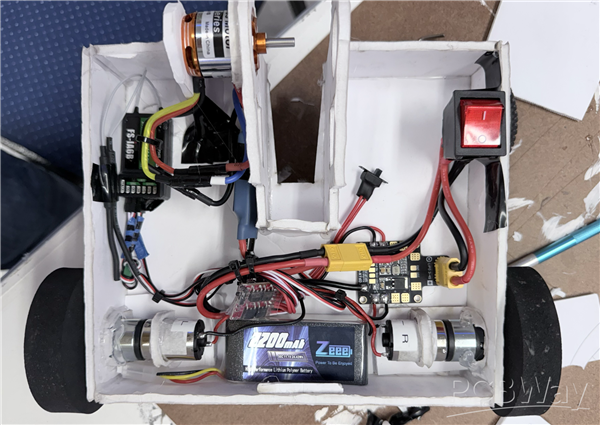
Top down view of the foamcore prototype.
Manufacturing
The majority of SKELD's structural components are manufactured through 3D printing.
The robot will utilize PLA printed components alongside a steel weapon assembly, electronic systems, and foam wheels. While these materials allow us to build and test the robot within the current budget/constraints, access to higher quality manufacturing options and materials would significantly improve the robot's performance and durability.
Additional resources would allow us to explore higher quality components, improved drivetrain solutions, and more advanced manufacturing methods that could increase the robot's competitiveness both at Berry College and potentially in future NHRL competitions.
Looking Toward Competition
My immediate goal is to successfully compete in the HackBerry Combat Robotics Tournament and demonstrate the results of an entire summer of engineering development.
Long-term, I would love to continue refining SKELD beyond the classroom and potentially compete in official NHRL events in the future if resources and opportunities permit.
Regardless of competitive outcomes, the project serves as a valuable educational experience that develops practical engineering skills while encouraging creativity, coopertition, and problem solving. I believe engineering projects should be more than just functional; they should be engaging, rewarding, and personally meaningful to the maker. SKELD reflects that philosophy by combining technical design with a unique identity inspired by our community, demonstrating that great technologies can be both effective and fun.
Support
As a student, I operate under significant budget constraints while attempting to build a competitive combat robot.
Support from Wpsload would directly contribute toward improved manufacturing capabilities, higher quality drivetrain components, upgraded wheels, and additional prototyping resources. Access to manufacturing services/materials would allow me to iterate more effectively and produce components that would otherwise be difficult for a student team to obtain.
Beyond the robot itself, Wpsload's support would help demonstrate how industry partnerships can empower student innovation. Projects like SKELD exist because students are given opportunities to experiment, fail, learn, and create. Sponsorships from companies like Wpsload help transform ambitious ideas into real engineering projects while inspiring future generations of makers and engineers to pursue their own designs.
Thank you for considering my application and supporting student innovation through hands-on engineering and combat robotics.
Apply for sponsorship >>- Comments(0)
- Likes(1)